سرعت سنجی دوربین سرعت سنج ثابت
بديهی است که برای يافتن سرعت چند جسم در فضای سه بعدی، بايد نسبت تغييرات مکانی آن ها را به زمان بدست آورد. لذا مکان يابی يک جسم در لحظات متوالی در فضای سه بعدی يک پيش نياز طبيعی برای سرعت سنجی هر جسمی مي باشد. برای اين منظور راه حل هايی از قبيل رادار، ليزر و عمق يابی بر اساس تصوير وجود دارد. در سيستم ارائه شده اين شرکت برای سرعت سنجی خودروهای عبوری از جاده از عمق يابی دو دیدی بر اساس تصوير استفاده شده است؛ که به طور خلاصه بدین شرح است: به ازای هر فريم از تصاوير دريافتی دوربين ها، فرآيند عمق سنجی انجام می شود. بدين ترتيب که دو تصویر از صحنه مقابل دوربین تهیه شده و با بدست آوردن اختلاف منظر بین این دو تصویر، عمق اجسام مورد نظر بدست می آید. با استفاده از محاسبات ریاضی و این واقعیت که توالی مکان های سه بعدی هر جسم در طول زمان گویای سرعت سه بعدی آن است می توان سرعت تمامی چند خودروی موجود در صحنه را به دقت اندازه گیری نمود.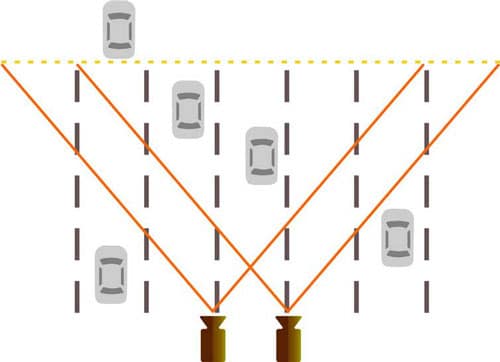
شماتیک سیستم دوربین استریو
در ادامه برخی قابلیت های ویژه سرعت سنجی سیستم بیان می گردد:
عدم وابستگی به شکل جاده
برای محاسبه دقيق سرعت يک خودرو، داشتن موقعيت دقيق مکانی خودرو در محدوده سرعت سنجی يک امر بديهی است. به همين دليل در بعضی ديگر از سيستم های سرعت سنجی وابستگی شديدی به شکل هندسی مسير وجود دارد. به عنوان مثال آن سيستم ها در نقاطي که شيب تند يا انحنای مسير وجود دارد قابل استفاده نمی باشند. اما با توجه به اينکه اين محصول بر پايه عمق سنجی تصويری کار می کند و با توجه به داده عمق، مختصات سه بعدی مسير را بدست می آورد، از شرايط هندسی مسير حرکت خودروها مستقل است. به بيان ديگر مختصات سه بعدی خودروها در طول حرکتشان با دقت بالايی محاسبه شده و در فرآيند سرعت سنجی به کار می رود و اين امر عدم وابستگی به شکل جاده را ميسر می کند.
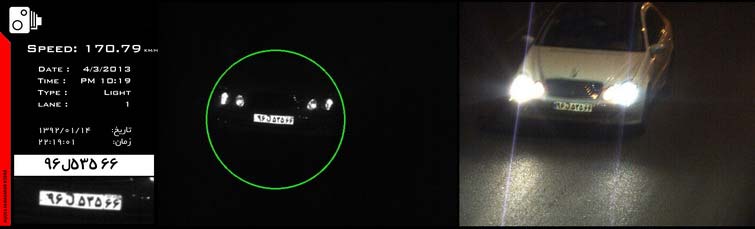
سرعت سنجی خودروهای بی پلاک
در بعضی از سيستمهای سرعت سنجی برای تشخيص و تفکيک خودروها از پلاک آن ها استفاده می کنند. در برخی ديگر نيز برای سرعت سنجی خودروها وابستگی شديدی به يافتن محل پلاک وجود دارد زيرا در اين سيستم ها برای تعيين ميزان جابجايی خودرو از مقدار جابجايی پلاک در فريم های متوالی استفاده می شود. با توجه به اينکه امکان عدم مکان يابی پلاک در خودروها به علل مختلف از جمله مخدوش بودن يا فقدان پلاک وجود دارد، ضعف شديدی در سيستم های وابسته به پلاک وجود دارد. در اين محصول با توجه به اينکه برای سرعت سنجی کل خودرو در طول مسير حرکتش در فضای سه بعدی در نظر گرفته می شود، هيچ گونه وابستگی به پلاک خودرو وجود ندارد و انواع خودروهای با پلاک، بدون پلاک، با پلاک مخدوش یا پلاک غیر استاندارد به درستی سرعت سنجی می شوند.
استقلال سرعت سنجی و ثبت تردد از وجود پلاک
دقت سرعت سنجی و تست آن
اين محصول به شکل عملياتی در برخی محورهای ایران به کار گرفته شده است و برای اثبات عملکرد آن تاکنون با بیش از 12 هزار خودروی عبوری در شرایط مختلف جوی و شب و روز تست شده است. در نتيجه خطای سرعت سنجی موردی هر خودرو حداکثر 4 درصد و میانگین خطای سرعت سنجی کمتر از یک درصد بدست آمده است. برای تست با GPS یک خودروی هدف مجهز به GPS با حساسیت و تعداد دیتای خروجی بالا، از مقابل سیستم سرعت سنج عبور کرده و سرعت ثبت شده توسط سیستم با سرعت اعلامی GPS مقایسه می گردد. و برای تست با لیزر نیز دستگاه لیزرگان سرعت سنج با قابلیت تصویربرداری در محدوده سیستم سرعت سنجی تنظیم شده و سرعت خودروهای عبوری تک تک توسط این دستگاه ثبت شده و با سرعت اعلامی سیستم مقایسه می گردد.احصاء قابل قبول کلیه خودروها
با توجه به اين که در اين محصول برای تشخيص و تفکيک خودروها از تصويربرداری عريض (wide) استفاده شده است لذا محدوديت جدی ای در گستردگی عرضی مسير وجود ندارد و صرفا با تغييرات اپتیکی مي توان تا شش لاین و حتی بيش از آن را پوشش داد.
در تستهای متوالی و با ساعت کاری بالا که از اين محصول به عمل آمده است درصد عدم تشخيص(missed) خودروها کمتر از 2 درصد می باشد. در ضمن وجود مداومت کاری مناسب در اين سيستم، احتمال عدم تشخيص خودرو را به کمترين مقدار ممکن رسانده است.
کار در شرایط نامناسب جوی
اين محصول به شکل عملياتی در مسیر کوهستانی و بیابانی مورد استفاده قرار گرفته است. اين محصول در طي مدت زمان بهره برداری در انواع شرايط مختلف جوی و نوری به شکل مناسب کارايی خود را نشان داده است. به گونه ای که اين سيستم حتی در هوای برفی و کولاک نيز قادر به انجام وظايف خود می باشد.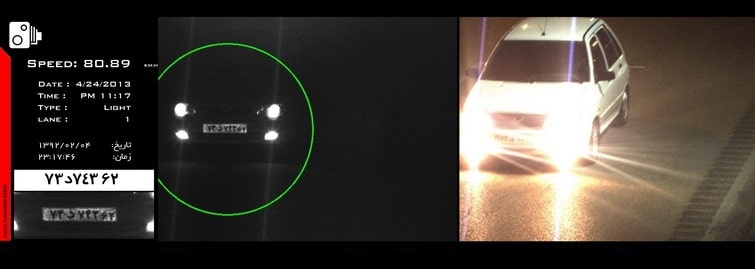
کارکرد سیستم در نور نامناسب
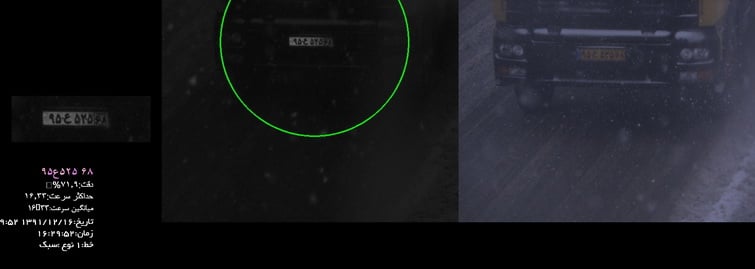
کارکرد سیستم در برف

کارکرد سیستم در مه و برف
محدوده سرعت سنجی
محدوده سرعت سنجی طولی: در اين محصول برای تشخيص و تفکيک خودروها از تصويربرداری عريض (wide) استفاده شده لذا با استفاده از لنزهای مناسب، عمق بسيار خوبی از جاده قابل دسترس است. اين قابليت خوب تصويربرداری اين امکان را ايجاد کرده است که بتوان خودروها را از فاصله بیش از 100 متری تشخيص داد و سرعت آن ها را بدست آورد. با توجه به اينکه در اين سيستم در مسافت زيادی، فرآيند تشخيص و سرعت سنجی خودروها انجام ميگيرد لذا احتمال عدم تشخيص خودرو (missed) بسيار کاهش يافته و همچنين دقت سرعت سنجی نسبت به سيستم های ديگری که در محدوده کوچکتری سرعت سنجی را انجام می دهند، بسيار بالاتر رفته است.
محدوده سرعت سنجی بر حسب کیلومتر: از آنجا که در اين محصول فرآيند تصويربرداری و عمق سنجی با نرخ بالا انجام می شود، ميتوان خودروهايی که با سرعت بسيار بالا حرکت مي کنند را نيز به دقت سرعت سنجی کرد. در حالت عملياتی اين محصول توانسته است خودرويی با سرعت بيش از 230 کيلومتر بر ساعت را تشخيص دهد و حتی به شکل بالقوه در محيط شبيه سازی سرعت خودروها را تا سرعت 400 کيلومتر بر ساعت تشخيص می دهد.
تفکیک خودروهای سنگین و سبک
با توجه به اينکه قوانين و محدوديت های راهنمايی و رانندگی برای خودروهای سبک و سنگين متفاوت است، تفکيک اين دو نوع خودرو در سيستم های سرعت سنجي امری ضروری است. از آنجا که در اين محصول، خودروها در فضای سه بعدی تشخيص، رهگيری و تفکيک داده می شوند لذا ابعاد يک خودرو با دقت مناسبی در فضای سه بعدی استخراج می شود و به راحتي و با دقت بسيار بالايی می توان خودروهای سبک و سنگين را تفکيک کرد. در ضمن بايد در نظر داشت که در ايران در پلاک خودروها نوع سبک و سنگين بيان نشده است لذا امکان تفکيک خودروها مستقل از پلاک، قابليت بسار مناسبی می باشد.
مقاوم به همپوشانی
از آنجا که در اين محصول برای تشخيص و تفکيک خودروها از تصويربرداری عريض (wide) استفاده شده است، حساسيت نسبت به همپوشانی در بين چند خودرو به کمترين حالت ممکن کاهش پيدا کرده است. در واقع تا آنجايی قابل تشخيص و جداسازی هستند که قابل مشاهده باشد.

مقاومت سیستم در برابر همپوشانی خودروها
کالیبره
اين محصول برای انجام فرآيند سرعت سنجی از تکنولوژی عمق يابی بر اساس تصوير (stereo vision) استفاده می کند لذا دقت سرعت سنجی، وابستگی به دقت کاليبره دوربين های مربوط به عمق يابی دارد. در طراحی سخت افزار اين محصول، اين نکته بسيار مهم به گونه ای هوشمندانه لحاظ شده است به طوری که فرآيند کاليبراسیون دوربين ها فقط يکبار و آن هم در محيطی غير از جاده محل نصب (به طور مثال در شرکت) انجام مي شود و سپس دوربين ها به راحتی در باکس سیستم نصب می شوند. با اين طراحی هوشمندانه، فرآيند کاليبراسيون دوربين های عمق سنجی نسبت به شرايط مکانی و زمانی کاملا مستقل می شوند و اين امر در توليد و نصب انبوه اين محصول بسيار راهگشا و مفيد است.تشخیص لاین حرکت
با توجه به اينکه محدوديت های راهنمايی و رانندگی مي تواند به ازای لاين های مختلف و نوع خودروهای مختلف متفاوت باشد تعيين لاين حرکت خودرو امری اجتناب ناپذير است. اين محصول با توجه به استفاده از تکنولوژی عمق يابی بر اساس تصوير (stereo vision) مختصات سه بعدی فضای جاده را به خوبی می تواند استخراج کند. اين قابليت اين امکان را ايجاد می کند که موقعيت خودروها را با دقت مناسبی در فضای جاده تعيين کند. لذا بدست آوردن لاين حرکت خودرو و يا تشخيص تغيير لاين در طول زمان رهگيری خودرو کاری آسان است.قابلیت رهگیری از جلو و عقب
اين محصول تمام خودروهايی که در برد عملياتی اش هستند را می تواند تشخيص دهد و هيچ گونه محدوديتی در اينکه خودروها در حالت دور شونده هستند و يا نزديک شونده ندارد. لذا اين محصول اين قابليت را دارد که هم در هر حالت دورشونده يا به عبارتی از پشت و هم در حالت نزديک شونده و يا به عبارتی از سمت جلو خودروها را تشخيص دهد و سرعت سنجي کند. بنا بر درخواست پلیس ایران این سیستم هم اکنون به صورت نزدیک شونده نصب شده است.عدم وابستگی به شکل خودرو
در بعضي از سيستم های ديگر سرعت سنجي خودرو، برای تشخيص و تفکيک يک خودرو از اجسام ديگر، از مشخصات هندسي عمومي خودروها استفاده مي شود مانند اينکه فرض می شود که يک خودرو از نماي روبرو به شکل يک مربع ديده مي شود. بديهي است که اين گونه فرضیات ممکن است باعث بروز خطا در کار سيستم شود. از آنجايی که در سيستم ارائه شده اين شرکت برای سرعت سنجی از تکنولوژی عمق يابی بر اساس تصوير استفاده می شود خودرو صرفا جسمی است که در فضای سه بعدی مکان يابی شده است. لذا اين سيستم در آن واحد می تواند يک کاميون بسيار بزرگ، يک خودروی سواری و يا حتی يک موتورسيکلت را تشخيص دهد و از هم تفکيک کند.

تشخیص ترددها فارغ از شکل ظاهری